Working with Complex Types
Tips:
Code snippets are shown in one of three ways throughout this environment:
- Code that looks like
thisis sample code snippets that is usually part of an explanation. - Code that appears in box like the one below can be clicked on and it will
automatically be typed in to the appropriate terminal window:
vim readme.txt - Code appearing in windows like the one below is code that you should type in
yourself. Usually there will be a unique ID or other bit your need to enter
which we cannot supply. Items appearing in <> are the pieces you should
substitute based on the instructions.
Add your name here - <name>
Features
In the previous tutorial, we saw how to traverse the AST to obtain the number of times a loop is encountered. In this tutorial, we will explore how to traverse the AST when more complex types exist in the input source code that we would like to obtain from the AST. We will take a look at some examples for various complex types, including type/declaration modifiers, function parameter extraction, resolving overloaded functions, and template parameter extraction.
A. Type and Declaration Modifiers
Most languages support the general concept of modifiers to types, declarations, etc. The keyword volatile for example is a modifier to the type where it is used in a declaration. Searching for the modifiers for types and declarations, however, can be confusing. They are often not where one would expect, and most often because of corner cases in the language that force them to be handled in specific ways.
Here, we will look at some tutorial code to demonstrate how to access the volatile modifier used in the declaration of types for variables. We demonstrate that the modifier is not present in the SgVariableDeclaration or the SgVariableDefinition, but is located in the SgModifierType used to wrap the type returned from the SgInitializedName (the variable in the variable declaration).
Example
Let’s take a look at the input source code example for this section, showing use of the volatile type modifier.
cd ${ROSE_BUILD}/tutorial
wget https://raw.githubusercontent.com/freeCompilerCamp/code-for-rose-tutorials/master/rose-complex-types/volatile_ex.cxx
cat -n volatile_ex.cxx
Click here to view source code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
// Input example of use of "volatile" type modifier
volatile int a, *b;
void foo()
{
for (volatile int y = 0; y < 10; y++)
{
}
}
int main(int argc, char* argv[])
{
return 0;
}
Notice we have three volatile variables: a, b, and y. b is actually a pointer to a volatile variable, rather than a volatile variable itself.
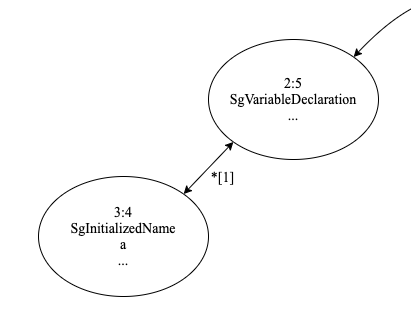
In our AST traversal to find volatile type modifiers, we are looking for nodes of type SgInitializedName that represent the notion of a variable in a declaration. The general concept of a variable declaration is represented by SgVariableDeclaration. Similarly, variable definitions/initializations are represented by SgVaraibleDefinition. It is important to note that, in ROSE, each SgVaraibleDeclaration contains only one SgInitializedName. We can see this from a small excerpt of the AST corresponding to the sample volatile_ex.cxx source, in particular the portion corresponding to the variable a:
The concept of type modifiers in ROSE is represented via the SgModifierType class, a subclass of SgType. The type modifier itself is represented by the SgTypeModifier class; we can obtain the latter from the former via the get_typeModifier() function. Although exposed through the API, it is important to note that type modifiers are not present in SgVariableDeclaration or SgVariableDefinition objects; they can only be reliably obtained via the SgModifierType returned from SgInitializedName.
With these considerations in mind, let’s discuss the source of the translator. We can view it by
cat -n ${ROSE_SRC}/tutorial/volatileTypeModifier.C
Click here to view source code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
#include "rose.h"
using namespace std;
class visitorTraversal : public AstSimpleProcessing
{
public:
void visit(SgNode* n);
};
void visitorTraversal::visit(SgNode* n)
{
// The "volatile" madifier is in the type of the SgInitializedName
SgInitializedName* initializedName = isSgInitializedName(n);
if (initializedName != NULL)
{
printf ("Found a SgInitializedName = %s \n",initializedName->get_name().str());
SgType* type = initializedName->get_type();
printf (" initializedName: type = %p = %s \n",type,type->class_name().c_str());
SgModifierType* modifierType = isSgModifierType(type);
if (modifierType != NULL)
{
bool isVolatile = modifierType->get_typeModifier().get_constVolatileModifier().isVolatile();
printf (" initializedName: SgModifierType: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
}
SgModifierNodes* modifierNodes = type->get_modifiers();
printf (" initializedName: modifierNodes = %p \n",modifierNodes);
if (modifierNodes != NULL)
{
SgModifierTypePtrVector modifierList = modifierNodes->get_nodes();
for (SgModifierTypePtrVector::iterator i = modifierList.begin(); i != modifierList.end(); i++)
{
printf ("initializedName: modifiers: i = %s \n",(*i)->class_name().c_str());
}
}
}
// Note that the "volatile" madifier is not in the SgVariableDeclarationnor the SgVariableDefinition
SgVariableDeclaration* variableDeclaration = isSgVariableDeclaration(n);
if (variableDeclaration != NULL)
{
bool isVolatile = variableDeclaration->get_declarationModifier().get_typeModifier().get_constVolatileModifier().isVolatile();
printf ("SgVariableDeclaration: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
SgVariableDefinition* variableDefinition = variableDeclaration->get_definition();
// printf ("variableDefinition = %p \n",variableDefinition);
if (variableDefinition != NULL)
{
bool isVolatile = variableDefinition->get_declarationModifier().get_typeModifier().get_constVolatileModifier().isVolatile();
printf ("SgVariableDefinition: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
}
}
}
// must have argc and argv here!!
int main(int argc, char * argv[])
{
// Initialize and check compatibility. See Rose::initialize
ROSE_INITIALIZE;
SgProject *project = frontend (argc, argv);
visitorTraversal myvisitor;
myvisitor.traverseInputFiles(project,preorder);
return backend(project);
}
Here, we perform a standard pre-order AST traversal. Let’s first take a look at lines 14-26 of the visit() function. Lines 28-38 of the translator can be ignored as the SgModifierTypes class is no longer used in ROSE.
14 SgInitializedName* initializedName = isSgInitializedName(n);
15 if (initializedName != NULL)
16 {
17 printf ("Found a SgInitializedName = %s \n",initializedName->get_name().str());
18 SgType* type = initializedName->get_type();
19
20 printf (" initializedName: type = %p = %s \n",type,type->class_name().c_str());
21 SgModifierType* modifierType = isSgModifierType(type);
22 if (modifierType != NULL)
23 {
24 bool isVolatile = modifierType->get_typeModifier().get_constVolatileModifier().isVolatile();
25 printf (" initializedName: SgModifierType: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
26 }For each IR node we visit, we check if it is of type SgInitializedName (lines 14-15) and print its name and type if so. Note that get_type() returns the general SgType object, from which we must obtain the SgModifierType object on line 21. If we do indeed have a type modifier from this variable, we use a series of member functions to determine if it is volatile on line 24 using get_typeModifier(). Note, in particular, that a type modifier can be const or volatile, hence the use of the get_constVolatileModifier() function followed by isVolatile().
Next, let’s look at lines 40-53:
40 // Note that the "volatile" madifier is not in the SgVariableDeclaration nor the SgVariableDefinition
41 SgVariableDeclaration* variableDeclaration = isSgVariableDeclaration(n);
42 if (variableDeclaration != NULL)
43 {
44 bool isVolatile = variableDeclaration->get_declarationModifier().get_typeModifier().get_constVolatileModifier().isVolatile();
45 printf ("SgVariableDeclaration: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
46 SgVariableDefinition* variableDefinition = variableDeclaration->get_definition();
47 // printf ("variableDefinition = %p \n",variableDefinition);
48 if (variableDefinition != NULL)
49 {
50 bool isVolatile = variableDefinition->get_declarationModifier().get_typeModifier().get_constVolatileModifier().isVolatile();
51 printf ("SgVariableDefinition: isVolatile = %s \n",(isVolatile == true) ? "true" : "false");
52 }
53 }This portion of the code demonstrates that the volatile modifier type is not exposed in the SgVariableDeclaration nor SgVariableDefinition IR nodes, despite being exposed to the API. We expect this portion of the code to always print false for any IR nodes of these types encountered.
Let’s run this traversal tool with our sample code above. Be sure to exit Vim first. First, we build it:
cd ${ROSE_BUILD}/tutorial
make volatileTypeModifier
And then run it with our input source code:
./volatileTypeModifier volatile_ex.cxx
Click here to show output.
SgVariableDeclaration: isVolatile = false
SgVariableDefinition: isVolatile = false
Found a SgInitializedName = a
initializedName: type = 0x7f2b107ee590 = SgModifierType
initializedName: SgModifierType: isVolatile = true
initializedName: modifierNodes = (nil)
SgVariableDeclaration: isVolatile = false
SgVariableDefinition: isVolatile = false
Found a SgInitializedName = b
initializedName: type = 0x7f2b1089a628 = SgPointerType
initializedName: modifierNodes = (nil)
SgVariableDeclaration: isVolatile = false
SgVariableDefinition: isVolatile = false
Found a SgInitializedName = y
initializedName: type = 0x7f2b107ee590 = SgModifierType
initializedName: SgModifierType: isVolatile = true
initializedName: modifierNodes = (nil)
Found a SgInitializedName = argc
initializedName: type = 0x7f2b10cbe010 = SgTypeInt
initializedName: modifierNodes = (nil)
Found a SgInitializedName = argv
initializedName: type = 0x7f2b0e62f010 = SgArrayType
initializedName: modifierNodes = (nil)From the output, we see that we have performed a successful AST traversal, and for each SgVariableDeclaration, SgVariableDefinition, and SgInitializedName IR nodes, we print some relevant information about volatile modifiers. As we expected, isVolatile is false for all SgVariableDeclaration and SgVariableDefinition nodes. For SgInitializdName nodes, we print the variable name, its type, whether or not it is volatile, and the modifier nodes. Note that a and y are volatile nodes. Although b is volatile-qualified, our tool does not realize this because the type of b is SgPointerType. This behavior is expected as volatile int *b is a pointer to a volatile variable, rather than a volatile pointer.
B. Function Parameter Types
The analysis of functions often requires the query of the function types. This tutorial example shows how to obtain the function parameter types for any function. Note that functions also have a type which is based on their signature, a combination of their return type and function parameter types. Any functions sharing the same return type and function parameter types have the same function type (the function type, a SgFunctionType IR node, will be shared between such functions).
Example
We will use the following code snippet for this section and the following.
cd ${ROSE_BUILD}/tutorial
wget https://raw.githubusercontent.com/freeCompilerCamp/code-for-rose-tutorials/master/rose-complex-types/function_param_ex.cxx
cat -n function_param_ex.cxx
Click here to view source code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
// Templated class declaration used in template parameter example code
template <typename T>
class templateClass
{
public:
int x;
void foo(int);
void foo(double);
};
// Overloaded functions for testing overloaded function resolution
void foo(int);
void foo(double)
{
int x = 1;
int y;
// Added to allow non-trivial CFG
if (x)
y = 2;
else
y = 3;
}
int main(int argc, char* argv[])
{
foo(42);
foo(3.14159265);
templateClass<char> instantiatedClass;
instantiatedClass.foo(7);
instantiatedClass.foo(7.0);
for (int i = 0; i < 4; i++)
{
int x;
}
return 0;
}
Notice that there is a lot going on in this source code - we have overloaded functions, template parameters, and a templated class. We will discuss how ROSE handles these cases in the following sections; for now, let us only focus on function parameter types.
Let’s take a look at the source code of the typeInfoFromFunctionParameter translator, included with ROSE, that reads an application (our source code above) and outputs information about the function parameter types for each function. This information includes the order of the function declaration in the global scope, name of the function, and the types of each parameter declared in the function declaration. We can view this source code by
cat -n ${ROSE_SRC}/tutorial/typeInfoFromFunctionParameters.C
Click here to view source code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
// Example ROSE Translator: used within ROSE/tutorial
#include "rose.h"
using namespace std;
int main( int argc, char * argv[] )
{
// Initialize and check compatibility. See Rose::initialize
ROSE_INITIALIZE;
// Build the AST used by ROSE
SgProject* project = frontend(argc,argv);
ROSE_ASSERT(project != NULL);
// Build a list of functions within the AST
Rose_STL_Container<SgNode*> functionDeclarationList = NodeQuery::querySubTree (project,V_SgFunctionDeclaration);
int functionCounter = 0;
for (Rose_STL_Container<SgNode*>::iterator i = functionDeclarationList.begin(); i != functionDeclarationList.end(); i++)
{
// Build a pointer to the current type so that we can call the get_name() member function.
SgFunctionDeclaration* functionDeclaration = isSgFunctionDeclaration(*i);
ROSE_ASSERT(functionDeclaration != NULL);
// DQ (3/5/2006): Only output the non-compiler generated IR nodes
if ( (*i)->get_file_info()->isCompilerGenerated() == false)
{
SgFunctionParameterList* functionParameters = functionDeclaration->get_parameterList();
ROSE_ASSERT(functionDeclaration != NULL);
// output the function number and the name of the function
printf ("Non-compiler generated function name #%3d is %s \n",functionCounter++,functionDeclaration->get_name().str());
SgInitializedNamePtrList & parameterList = functionParameters->get_args();
int parameterCounter = 0;
for (SgInitializedNamePtrList::iterator j = parameterList.begin(); j != parameterList.end(); j++)
{
SgType* parameterType = (*j)->get_type();
printf (" parameterType #%2d = %s \n",parameterCounter++,parameterType->unparseToString().c_str());
}
}
else
{
printf ("Compiler generated function name #%3d is %s \n",functionCounter++,functionDeclaration->get_name().str());
}
}
return 0;
}
Let’s start by looking at lines 17-24:
16 // Build a list of functions within the AST
17 Rose_STL_Container<SgNode*> functionDeclarationList = NodeQuery::querySubTree (project,V_SgFunctionDeclaration);
19 int functionCounter = 0;
20 for (Rose_STL_Container<SgNode*>::iterator i = functionDeclarationList.begin(); i != functionDeclarationList.end(); i++)
21 {
22 // Build a pointer to the current type so that we can call the get_name() member function.
23 SgFunctionDeclaration* functionDeclaration = isSgFunctionDeclaration(*i);
24 ROSE_ASSERT(functionDeclaration != NULL);Note we do not explicitly traverse the AST as in previous examples; instead, we can use the alternate method of using the Query Library to search for nodes with a specific type. This is useful for simple translators, such as this one. To query the AST in this regard, we use the NodeQuery namespace to obtain a container of SgNodes corresponding to the type being searched for. NodeQuery::querySubTree takes as parameters the root SgProject node and the IR node type to search for. In our case, we are looking for V_SgFunctionDeclaration. Many SAGE classes/nodes in ROSE contain static variants, prefixed by V_, that can be used for queries.
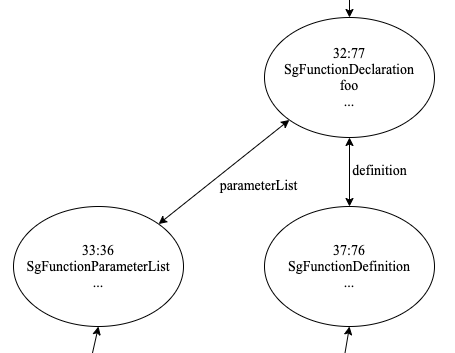
On line 20, we iterate through the container and keep track of the number of function declarations encountered so far. In ROSE, function parameters are contained within the SgFunctionParameterList class, which are child nodes of SgFunctionDeclaration IR nodes, as shown in the AST excerpt below.
Hence, we need to extract these parameters from the SgFunctionDeclaration nodes.
Next, let’s take a look at the remaining lines of the translator.
26 // DQ (3/5/2006): Only output the non-compiler generated IRnodes
27 if ( (*i)->get_file_info()->isCompilerGenerated() == false)
28 {
29 SgFunctionParameterList* functionParameters = functionDeclaration->get_parameterList();
30 ROSE_ASSERT(functionDeclaration != NULL);
31
32 // output the function number and the name of the function
33 printf ("Non-compiler generated function name #%3d is %s \n",functionCounter++,functionDeclaration->get_name().str());
34
35 SgInitializedNamePtrList & parameterList = functionParameters->get_args();
36 int parameterCounter = 0;
37 for (SgInitializedNamePtrList::iterator j = parameterList.begin(); j != parameterList.end(); j++)
38 {
39 SgType* parameterType = (*j)->get_type();
40 printf (" parameterType #%2d = %s \n",parameterCounter++,parameterType->unparseToString().c_str());
41 }
42 }
43 else
44 {
45 printf ("Compiler generated function name #%3d is %s \n",functionCounter++,functionDeclaration->get_name().str());
46 }Note that there are a number of builtin functions defined as part of the g++ and gcc compatibility and these are output as well. These are marked as compiler generated functions within ROSE. We would like to differentiate between the two different types, and this is what the conditional on line 27 is doing. We continue so long as we are not working with a compiler generated function.
To obtain the parameters of the function, we simply call the get_parameterList() function to obtain the SgFunctionParameterList object. We then obtain the initialized names of the function parameters by the get_args() function, followed by iterating over each parameter and printing its type (lines 35-41). Finally, we print all the compiler generated functions on line 45. It is important to note that we iterate for each function found in the input source code, and for each function found, we print its parameter types.
Let’s run this translator on the input code above. Build it by
cd ${ROSE_BUILD}/tutorial
make typeInfoFromFunctionParameters
Run the translator on our function_param_ex.cxx input file by
./typeInfoFromFunctionParameters function_param_ex.cxx
Click here to show output.
...3506 compiler generated functions...
Non-compiler generated function name #3507 is foo
parameterType # 0 = int
Non-compiler generated function name #3508 is foo
parameterType # 0 = double
Non-compiler generated function name #3509 is foo
parameterType # 0 = int
Non-compiler generated function name #3510 is foo
parameterType # 0 = double
Compiler generated function name #3511 is foo
Compiler generated function name #3512 is foo
Non-compiler generated function name #3513 is main
parameterType # 0 = int
parameterType # 1 = char *[]After 3,506 compiler generated functions, we see our own function declaration foo (and main). Note that the foo function is overloaded, but the translator has no issue identifying them as separate entities. In each case, we are able to print the parameter types.
C. Resolving Overloaded Functions
In this section, we will look at a translator that reads an application (the same function_param_ex.cxx source code as above) and reposts on the mapping between function calls and function declarations. This is trivial since all overloaded function resolution is done within the frontend and so need not be computed (this is because all type resolution is done in the frontend and stored in the AST explicitly). Other compiler infrastructures often require this to be figured out from the AST, when type resolution is unavailable, and while not too hard for C, this is particularly complex for C++ (due to overloading and type promotion within function arguments).
Example
This translator is known as resolveOverloadedFunction and is available at
cat -n ${ROSE_SRC}/tutorial/resolveOverloadedFunction.C
Click here to view source code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
// Example ROSE Translator: used within ROSE/tutorial
#include "rose.h"
using namespace std;
int main( int argc, char * argv[] )
{
// Initialize and check compatibility. See Rose::initialize
ROSE_INITIALIZE;
// Build the AST used by ROSE
SgProject* project = frontend(argc,argv);
ROSE_ASSERT(project != NULL);
// Build a list of functions within the AST
Rose_STL_Container<SgNode*> functionCallList = NodeQuery::querySubTree (project,V_SgFunctionCallExp);
int functionCounter = 0;
for (Rose_STL_Container<SgNode*>::iterator i = functionCallList.begin(); i != functionCallList.end(); i++)
{
SgFunctionCallExp* functionCallExp = isSgFunctionCallExp(*i);
ROSE_ASSERT(functionCallExp != NULL);
SgExpression* functionExpression = functionCallExp->get_function();
ROSE_ASSERT(functionExpression != NULL);
SgFunctionRefExp* functionRefExp = isSgFunctionRefExp(functionExpression);
SgFunctionSymbol* functionSymbol = NULL;
if (functionRefExp != NULL)
{
// Case of non-member function
functionSymbol = functionRefExp->get_symbol();
}
else
{
// Case of member function (hidden in rhs of binary dot operator expression)
SgDotExp* dotExp = isSgDotExp(functionExpression);
ROSE_ASSERT(dotExp != NULL);
functionExpression = dotExp->get_rhs_operand();
SgMemberFunctionRefExp* memberFunctionRefExp = isSgMemberFunctionRefExp(functionExpression);
ROSE_ASSERT(memberFunctionRefExp != NULL);
functionSymbol = memberFunctionRefExp->get_symbol();
}
ROSE_ASSERT(functionSymbol != NULL);
SgFunctionDeclaration* functionDeclaration = functionSymbol->get_declaration();
ROSE_ASSERT(functionDeclaration != NULL);
// Output mapping of function calls to function declarations
printf ("Location of function call #%d at line %d resolved by overloaded function declared at line %d \n",
functionCounter++,
functionCallExp->get_file_info()->get_line(),
functionDeclaration->get_file_info()->get_line());
}
return 0;
}
Let’s begin with lines 20-31.
20 for (Rose_STL_Container<SgNode*>::iterator i = functionCallList.begin(); i != functionCallList.end(); i++)
21 {
22 SgFunctionCallExp* functionCallExp = isSgFunctionCallExp(*i);
23 ROSE_ASSERT(functionCallExp != NULL);
24
25
26 SgExpression* functionExpression = functionCallExp->get_function();
27 ROSE_ASSERT(functionExpression != NULL);
28
29 SgFunctionRefExp* functionRefExp = isSgFunctionRefExp(functionExpression);
30
31 SgFunctionSymbol* functionSymbol = NULL;In this translator, we follow much of the same initial procedure to perform a subtree query as in the previous section. This time, however, we are interested in SgFunctionCallExp nodes, and so we use V_SgFunctionCallExp as the parameter to the subtree query. SgFunctionCallExp represents the general concept of a C++ function call and is an expression. Once we have it on lines 22-23, we obtain the actual expression using the get_function() member function. This object will let us perform a more detailed analysis of function expressions in the input source code.
In C, and more so in C++, the left-hand side of a function call (e.g., foo) is itself an expression. This expression may be simple, such as in the case when a free-standing function is called directly; for example, by calling foo(). In this case, the left-hand side is an SgFunctionRefExp. Notice that we obtain this expression on line 29.
Of course, the left-hand side of a function call can be significantly more complicated and can be quite arbitrary. We could have a C++ call to a member function (e.g., bar.foo() or bar->foo()), or have a family of function calls if the function is virtual. There could also be arbitrary expressions producing function pointers (e.g., (******(foo))()). As a result, it can often be tricky to analyze left-hand sides of function call expressions. Fortunately, ROSE provides a library function that takes in a call expression and fills a vector with a set of function declarations that could be called (see Section F for more details). There are also some expression-based classes that allow us to extract the left-hand side easier; e.g., SgDotExp representing the dot operator.
With this kept in mind, we can look into the core of translator on lines 32-59.
32 if (functionRefExp != NULL)
33 {
34 // Case of non-member function
35 functionSymbol = functionRefExp->get_symbol();
36 }
37 else
38 {
39 // Case of member function (hidden in rhs of binary dot operator expression)
40 SgDotExp* dotExp = isSgDotExp(functionExpression);
41 ROSE_ASSERT(dotExp != NULL);
42
43 functionExpression = dotExp->get_rhs_operand();
44 SgMemberFunctionRefExp* memberFunctionRefExp = isSgMemberFunctionRefExp(functionExpression);
45 ROSE_ASSERT(memberFunctionRefExp != NULL);
46
47 functionSymbol = memberFunctionRefExp->get_symbol();
48 }
49
50 ROSE_ASSERT(functionSymbol != NULL);
51
52 SgFunctionDeclaration* functionDeclaration = functionSymbol->get_declaration();
53 ROSE_ASSERT(functionDeclaration != NULL);
54
55 // Output mapping of function calls to function declarations
56 printf ("Location of function call #%d at line %d resolved by overloaded function declared at line %d \n",
57 functionCounter++,
58 functionCallExp->get_file_info()->get_line(),
59 functionDeclaration->get_file_info()->get_line());In our example here, we keep things simple and look into the case where the left-hand side is either a free-standing function or is a member function accessed via the dot operator. In the latter case, the SgFunctionRefExp object obtained previously will be NULL, as the left-hand side is more complicated than a simple free-standing function. Otherwise, we can obtain the left-hand side by simply extracting the SgFunctionSymbol, which represents the function name, via the get_symbol() (lines 32-36). For member functions, we need to obtain the expression from the right-hand side of the dot operator (line 41), which will be of type SgMemberFunctionRefExp. Once we have this object, we can obtain the symbol through the same get_symbol() function as previously (lines 42-45). Lines 52-60 obtain the function declaration using the obtained symbol, which contains declaration information (e.g., location in source code).
Let’s build this translator by
cd ${ROSE_BUILD}/tutorial
make resolveOverloadedFunction
Run the translator on function_param_ex.cxx:
./resolveOverloadedFunction function_param_ex.cxx
Click here to view output.
Location of function call #0 at line 28 resolved by overloaded function declared at line 13
Location of function call #1 at line 29 resolved by overloaded function declared at line 0
Location of function call #2 at line 32 resolved by overloaded function declared at line 0
Location of function call #3 at line 33 resolved by overloaded function declared at line 0The output shows each function call of foo being resolved by an overloaded function, even those inside the instantiated class. It may appear curious that the source location for the last three calls of foo are output as 0. Looking at the input code, we see that the first call foo(42) at line 28 is resolved by the overloaded function at line 13, as output by the translator. The second call foo(3.14159265) at line 29 is resolved by the overloaded function definition at line 14. The translator, however, outputs that the resolved overloaded function is at line 0; this is because, for consistency purposes, the ROSE compiler requires a function to be declared separately before it is defined. In the case where the first function declaration is also a function definition, as is the scenario here, ROSE generates a hidden first non-defining declaration, hence the output of 0. Similarly, the last two calls of foo on lines 32 and 33 are template functions, which are instantiated by the compiler, and therefore not technically part of the source code, leading to the output of 0 for the source location of these two calls as well.
D. Template Parameter Extraction
In this tutorial, we will look at a translator that reads an application (a modified version of the previous input) and outputs some information about each instantiated template, including the template arguments. As a brief note, ROSE provides special handling for C++ templates because template instantiation must be controlled by the compiler. Templates that require instantiation are instantiated by ROSE and can be seen in the traversal of the AST (and transformed). Any templates that can be instantiated by the backend compiler and are not transformed are not output within the code generation phase.
Example
For this section, we will consider some templated example source code, which a slightly modified version of the previous two sections’ input:
cd ${ROSE_BUILD}/tutorial
wget https://raw.githubusercontent.com/freeCompilerCamp/code-for-rose-tutorials/master/rose-complex-types/template_param_ex.cxx
cat -n template_param_ex.cxx
Click here to view code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
// Templated class declaration used in template parameter example code
template <typename T>
class templatedClass
{
public:
int x;
void foo(int);
void foo(double);
};
int main()
{
templatedClass<char> instantiatedClass;
instantiatedClass.foo(7);
instantiatedClass.foo(7.0);
templatedClass<int> instantiatedClassInt;
templatedClass<float> instantiatedClassFloat;
templatedClass<templatedClass<char>> instantiatedClassNestedChar;
for (int i = 0; i < 4; i++)
{
int x;
}
return 0;
}
Notice that this code contains a templated class, and we make several instantiations of that class. In this example, we will look into extracting the template parameters from these instantiated objects.
The translator of interest for this section is templateParameter:
cat ${ROSE_SRC}/tutorial/templateParameter.C
Click here to view code.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
1 // Example ROSE Translator: used within ROSE/tutorial
2
3 #include "rose.h"
4
5 using namespace std;
6
7 int main( int argc, char * argv[] )
8 {
9 // Initialize and check compatibility. See Rose::initialize
10 ROSE_INITIALIZE;
11
12 // Build the AST used by ROSE
13 SgProject* project = frontend(argc,argv);
14 ROSE_ASSERT(project != NULL);
15
16 // Build a list of functions within the AST
17 Rose_STL_Container<SgNode*> templateInstantiationDeclList =
18 NodeQuery::querySubTree (project,V_SgTemplateInstantiationDecl);
19
20 int classTemplateCounter = 0;
21 for (Rose_STL_Container<SgNode*>::iterator i = templateInstantiationDeclList.begin();
22 i != templateInstantiationDeclList.end(); i++)
23 {
24 SgTemplateInstantiationDecl* instantiatedTemplateClass =isSgTemplateInstantiationDecl(*i);
25 ROSE_ASSERT(instantiatedTemplateClass != NULL);
26
27 // output the function number and the name of the function
28 printf ("Class name #%d is %s \n",
29 classTemplateCounter++,
30 instantiatedTemplateClass->get_templateName().str());
31
32 const SgTemplateArgumentPtrList& templateParameterList =instantiatedTemplateClass->get_templateArguments();
33 int parameterCounter = 0;
34 for (SgTemplateArgumentPtrList::const_iterator j = templateParameterList.begin();
35 j != templateParameterList.end(); j++)
36 {
37 printf (" TemplateArgument #%d = %s \n",parameterCounter++,(*j)->unparseToString().c_str());
38 }
39 }
40
41 return 0;
42 }
43
Let’s look at the iteration over each SgTemplateInstanationDecl node, which contains all template instantiation declarations in our code. This corresponds to lines 24-38.
24 SgTemplateInstantiationDecl* instantiatedTemplateClass =isSgTemplateInstantiationDecl(*i);
25 ROSE_ASSERT(instantiatedTemplateClass != NULL);
26
27 // output the function number and the name of the function
28 printf ("Class name #%d is %s \n",
29 classTemplateCounter++,
30 instantiatedTemplateClass->get_templateName().str());
31
32 const SgTemplateArgumentPtrList& templateParameterList =instantiatedTemplateClass->get_templateArguments();
33 int parameterCounter = 0;
34 for (SgTemplateArgumentPtrList::const_iterator j = templateParameterList.begin();
35 j != templateParameterList.end(); j++)
36 {
37 printf (" TemplateArgument #%d = %s \n",parameterCounter++,(*j)->unparseToString().c_str());
38 }For each declaration, we obtain a pointer to the SgTemplateInstanationDecl object, as usual, and output the template name using get_templateName(). To obtain the parameter list, we use the get_templateArguments() function, much like we did for function parameter extraction (line 32). We then iterate through each parameter and print the template argument type. This translator is very similar to the function parameter extraction translator in Section B; however, it showcases working with template parameters instead. This can be trickier due to the ability to nest template parameters.
Let’s build and run this tool with the example code above:
cd ${ROSE_BUILD}/tutorial
make templateParameter
./templateParameter template_param_ex.cxx
Click here to view output.
Class name #0 is templatedClass
TemplateArgument #0 = char
Class name #1 is templatedClass
TemplateArgument #0 = int
Class name #2 is templatedClass
TemplateArgument #0 = float
Class name #3 is templatedClass
TemplateArgument #0 = templatedClass< char >The output shows each template class instantiation that appears in the input source code. Our first instantiation, on line 16, has template parameter char, as shown in the output of the translator. We have three more instantiations on lines 20-22, including one with a nested char parameter. However, the translator has no issue indicating that the argument here is of type templatedClass<char>.
E. Summary
In this chapter, we have gotten familiar with working with various complex types in ROSE. We learned about traversing the AST and searching for nodes of interest, both with a traversal and with a query. We looked at examples involving type and declaration modifiers, function and template parameter extraction, and overloaded function resolution. There are many other types that can be searched with the AST in ROSE. We recommend looking into the ROSE API to learn more.
Practical
We encourage you to check your understanding of this section by completing the related Practical.
F. Additional Resources
- ROSE provides a library function that takes in a call expression and fills a vector with a set of function declarations that could be called. If a callee cannot be determined exactly (as in the case with a function pointer), the set of functions returned is an overapproximation. The CallGraph.h header contains this function
CallTargetSet::getPropertiesForExpression. - The ROSE HTML reference page contains a full doxygenerated API that may be helpful in writing your own tools that search for specific types in the AST. Classes referenced in this tutorial can also be viewed here for more information.
- The ROSE User manual contains some more information about AST queries in Chapter 6.
Source file for this page: link


